
Недостатки радиолокатора с синтезированной апертурой. Основы теории синтезированных апертур. Что было раньше
АПЕРТУРНЫЙ СИНТЕЗ, метод получения высокого углового разрешения с помощью синтеза результатов измерений, выполняемых радиоинтерферометром, состоящим из двух малых апертур, перемещающихся в пределах большой апертуры, и корреляционного (перемножающего) приёмника. Результат измерения методом апертурного синтеза аналогичен измерениям с антенной большой апертуры. При апертурном синтезе выполняется большое количество измерений при различных положениях элементов и результаты суммируются с определёнными весами и фазами.
Метод апертурного синтеза предложен в 1952 году М. Райлом, исследовавшим с его помощью радиоструктуру галактик. В 1974 году Райл совместно с Э. Хьюишем были удостоены Нобелевской премии «за новаторские исследования в радиоастрофизике». Наибольшее распространение апертурный синтез получил в радиоастрономии и радиолокации. В радиоастрономии апертурный синтез используется в связи с задачами исследования углового распределения интенсивности излучения радиоисточника с тонкой структурой от угловых минут до долей секунд. Для таких исследований нужны антенны с отношением d/λ (d - линейный размер апертуры, λ - длина волны) порядка 10 3 —10 6 , поэтому для сантиметрового диапазона радиоволн d должно быть порядка сотен метров и более. Естественно, обычные антенны с такой апертурой создать невозможно, поэтому апертуру «синтезируют», проводя измерения в отдельных точках, расположенных внутри этой синтезированной апертуры, и выполняя соответствующую обработку измерений. В результате достигается высокое угловое разрешение.
При использовании метода апертурного синтеза большая антенна разбивается на N элементов. Падающие волны, отразившись от каждого элемента, попадают в фокус антенны в фазе. Поэтому высокочастотное напряжение V(t) в фокусе может быть записано в виде суммы составляющих ΔV i (t) от отдельный элементов:
Мощность Р на выходе приёмника большой антенны пропорциональна среднему значению квадрата напряжения:
Из формулы (2) видно, что результат измерений содержит слагаемые, зависящие от сигналов, получаемых только от пар элементов. Каждое слагаемое может быть измерено с помощью двух малых антенн размером, равным элементу апертуры, находящихся в положениях i и k, и корреляционного (перемножающего) приёмника. Если наблюдаемый участок неба не содержит переменных источников, то такой интерферометр можно использовать для последовательного измерения членов ряда (2).
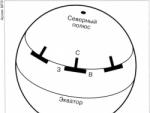
Отрезок линии восток-запад на поверхности Земли, видимый со стороны удалённого источника, за 12 ч поворачивается на 180°. Если все элементы антенной решётки на этом отрезке следят за источником, то за 12 ч можно синтезировать круглую апертуру в плоскости, перпендикулярной оси вращения Земли, с диаметром, равным длине отрезка. Ширина синтезированной диаграммы в любом направлении обратно пропорциональна проекции апертуры на это направление. Ухудшение разрешающей способности в направлениях, близких к плоскости экватора, устраняется при использовании Т-образной антенной решётки с отрезками, ориентированными в направлениях восток-запад и север-юг (рис.).

Современные системы апертурного синтеза состоят из большого числа полноповоротных антенн и одновременно действующих независимых корреляционных интерферометров, что значительно сокращает время наблюдений. Вращаясь вместе с Землёй, каждый интерферометр измеряет большое число слагаемых ряда (2). Для многоэлементных интерферометров метод апертурного синтеза позволяет синтезировать луч с такой шириной, которая может быть получена с апертурой, имеющей размеры, сравнимые с размерами антенной решётки.
Для более полного извлечения информации из результатов измерений используются априорные сведения о яркости неба. Такая априорная информация позволяет применять системы далеко разнесённых антенн, а также строить карты неба, используя только амплитудные измерения, когда сведения о фазе ненадёжны или отсутствуют.
Первые работы с использованием для апертурного синтеза небольших подвижных антенн были выполнены в Кембридже (Великобритания) в 1954 году. В Сиднее (Австралия) в 1956 году впервые использовалось вращение Земли для синтеза двумерной решётки с помощью линейной. Наиболее известная система апертурного синтеза - антенная решётка VLA (Very Large Array) в штате Нью-Мексико (США), завершена в 1981 году. Она состоит из 27 полноповоротных параболоидов диаметром 25 м каждый, которые могут перемещаться вдоль трёх 21-километровых рельсовых путей, проложенных в виде буквы Y. Угловое разрешение этой системы на длине волны 1,3 см составляет 0,05".
Метод апертурного синтеза используется также в интерферометрах, образованных антеннами, разнесёнными на сотни и тысячи километров (радиоинтерферометры со сверхдлинными базами). Это позволяет синтезировать апертуры, сравнимые с размерами Земли, и получать угловое разрешение порядка 0,001", намного превосходящее достигнутое в оптической астрономии. В перспективе - создание апертур Земля-космос, часть элементов которых будет размещена на космических аппаратах (проект «Радиоастрон», Россия).
Лит.: Kraus J.D. Radio astronomy. 2nd ed. Powell, 1986; Христиансен У., Хёгбом И. Радиотелескопы. М., 1988.
Владельцы патента RU 2397509:
Изобретение относится к области радиотехники, в частности к области техники нелинейной радиолокации, и может использоваться для поиска и обнаружения объектов с нелинейными электрическими свойствами. Достигаемый технический результат изобретения заключается в реализации алгоритма синтезирования апертуры антенны в нелинейной радиолокационной станции (РЛС) и достижении углового разрешения, близкого к потенциальному. Сущность изобретения заключается в измерении средней скорости движения и случайных отклонений носителя нелинейной РЛС от заданной траектории вдоль осей абсцисс, ординат, аппликат и реализации в каждом из каналов обработки эхо-сигналов нелинейной РЛС известного алгоритма синтезирования апертуры антенны с учетом результатов измерения. 3 ил.
Изобретение относится к области радиотехники, в частности к области техники нелинейной радиолокации, и может использоваться для поиска и обнаружения объектов с нелинейными электрическими свойствами (ОЭНС).
Известна РСА , состоящая из последовательно соединенных антенного устройства, приемопередатчика, фазовых детекторов, аналого-цифровых преобразователей, цифровой системы обработки, процессора системы индикации, системы индикации, а также системы регистрации и системы передачи по широкополосному каналу, принцип действия которой основан на формировании синтезированного раскрыва антенны больших размеров с использованием реальной антенны малых размеров. При этом для уменьшения влияния случайных пространственных отклонений носителя РСА от заданной траектории (траекторных нестабильностей) на результаты ее функционирования применяется система компенсации траекторных нестабильностей , основанная на комплексном использовании двух инерциальных навигационных систем - штатной инерциальной навигационной системы с коррекцией от радиотехнических датчиков (ГЛОНАСС, ДИСС или РЛС в режиме измерения скорости и угла сноса) и широкополосной инерциальной навигационной системы с системой акселерометров и датчиков угловых скоростей (микронавигация). Однако РСА не позволяет вести поиск и обнаружение ОЭНС, так как обработка эхо-сигналов от радиолокационных целей производится только на несущей частоте зондирующего сигнала (ЗС) ω 0 .
Наиболее близкой по технической сущности (прототипом к предполагаемому изобретению) является нелинейная РЛС (НРЛС), например , состоящая из передатчика, передающей антенны и двух идентичных каналов обработки сигналов на частотах второй 2ω 0 и третьей 3ω 0 гармоник ЗС, каждый из которых содержит последовательно соединенные приемную антенну и приемник, а также устройства индикации. Принцип работы НРЛС основан на приеме сигналов отклика от ОЭНС на частотах 2ω 0 и 3ω 0 , их обработке и индикации уровней. Это обеспечивается тем, что обычно ОЭНС с полупроводниковыми компонентами имеют на второй гармонике уровень сигналов отклика на 20-30 дБ более высокий, чем на третьей гармонике . Для ОЭНС контактного типа, как правило, выполняется обратное соотношение. Недостатками нелинейной РЛС являются отсутствие учета влияния траекторных нестабильностей на процесс ее функционирования и ненадежность признака сравнения уровней сигналов отклика от ОЭНС на второй и третьей гармониках ЗС вследствие сильной зависимости изменения рассеянной ОЭНС мощности на гармониках ЗС от положения ОЭНС относительно направления зондирования и номера гармоники ЗС .
Задача, на решение которой направлена заявляемая нелинейная РЛС с синтезированной апертурой антенны, состоит в повышении угловой разрешающей способности нелинейной РЛС.
Технический результат изобретения выражается в реализации алгоритма синтезирования апертуры антенны в нелинейной РЛС и достижении углового разрешения, близкого к потенциальному.
Технический результат достигается тем, что в известной НРЛС, состоящей из передатчика, передающей антенны и двух идентичных каналов обработки сигналов на частотах второй 2ω 0 и третьей 3ω 0 гармоник ЗС, каждый из которых содержит последовательно соединенные приемную антенну и приемник, а также устройства индикации, дополнительно введены опорный генератор, синтезатор частот и блок компенсации траекторных нестабильностей, предназначенный для формирования соответствующего корректирующего сигнала рассогласования на основании измеренной средней скорости движения и случайных отклонений носителя нелинейной РЛС от заданной траектории, а в каждый из каналов - устройство сдвига фазы, первый и второй фазовые детекторы, первый и второй аналого-цифровые преобразователи, первый вычислитель опорной функции, предназначенный для формирования синусной составляющей опорной функции, второй вычислитель опорной функции, предназначенный для формирования косинусной составляющей опорной функции, цифровая система обработки, предназначенная для формирования радиолокационного изображения объектов с нелинейными электрическими свойствами, при этом выход опорного генератора подключен ко входу синтезатора частот и ко вторым входам приемников первого и второго канала, первый выход синтезатора частот подключен ко входу передатчика, выход которого соединен со входом передающей антенны, второй выход синтезатора частот подключен в каждом канале ко второму входу первого фазового детектора и входу устройства сдвига фазы, выход устройства сдвига фазы каждого канала соединен со вторым входом второго фазового детектора соответствующего канала, выход приемника каждого канала подключен к первым входам первого и второго фазовых детекторов соответствующего канала, выходы которых соединены соответственно со входами первого и второго аналого-цифровых преобразователей соответствующих каналов, выходы которых в каждом из каналов подключены соответственно к первому и второму входам цифровой системы обработки соответствующего канала, входы первого и второго вычислителей опорной функции каждого канала соединены с выходом блока компенсации траекторных нестабильностей, выходы первого и второго вычислителей опорной функции каждого канала подключены соответственно к третьему и четвертому входам цифровой системы обработки соответствующего канала, выходы цифровых систем обработки первого и второго каналов соединены соответственно с первым и вторым входами устройства индикации, а блок компенсации траекторных нестабильностей содержит генератор тактовых импульсов, устройство масштабирования, устройство определения направления перемещения по осям прямоугольной системы координат на основании измеренной средней скорости движения и случайных отклонений носителя нелинейной РЛС от заданной траектории, таймер, запоминающее устройство, блок ключей, состоящий из трех ключей, устройство вычитания, блок суммирования, состоящий из трех устройств суммирования, блок запоминающих устройств, состоящий из трех запоминающих устройств, блок масштабирования, состоящий из трех устройств масштабирования, блок умножения кодов, состоящий из трех умножителей кодов, сумматор и преобразователь кодов, при этом генератор тактовых импульсов и устройство определения направления перемещения по осям прямоугольной системы координат соединены последовательно, сумматор, преобразователь кодов, устройство масштабирования и запоминающее устройство соединены последовательно, кроме того, первый, второй и третий выходы устройства определения направления перемещения по осям прямоугольной системы координат подключены к первым входам соответствующих ключей блока ключей, вторые входы которых соединены с выходом таймера, первый выход устройства определения направления перемещения по осям прямоугольной системы координат соединен также со вторым входом устройства вычитания, выходы первого, второго и третьего ключей блока ключей соединены с первыми входами соответствующих устройств суммирования блока суммирования, выходы которых подключены ко входам соответствующих запоминающих устройств блока запоминающих устройств, выходы которых соединены со вторыми входами соответствующих устройств суммирования блока суммирования и со входами соответствующих устройств масштабирования блока масштабирования, выход каждого устройства масштабирования блока масштабирования подключен к первому и второму входам соответствующих умножителей кодов блока умножения кодов, выходы первого, второго и третьего умножителей кодов блока умножения кодов соединены с соответствующими входами сумматора, выход запоминающего устройства подключен к первому входу устройства вычитания, а выход устройства вычитания, второй и третий выходы устройства определения направления перемещения по осям прямоугольной системы координат, выход преобразователя кодов являются соответственно первым, вторым, третьим и четвертым выходами блока компенсации траекторных нестабильностей.
Сущность изобретения заключается в измерении средней скорости движения и случайных отклонений носителя нелинейной РЛС от заданной траектории вдоль осей абсцисс, ординат, аппликат и реализации в каждом из каналов обработки эхо-сигналов нелинейной РЛС известного алгоритма синтезирования апертуры антенны с учетом результатов измерения, что позволяет достичь угловой разрешающей способности, близкой к потенциальной.
Структурная схема предложенной нелинейной РЛС с синтезированной апертурой антенны приведена на фиг.1.
Предложенная нелинейная РЛС с синтезированной апертурой антенны состоит из передатчика 5, передающей антенны 1, приемных антенн первого и второго каналов 2 и 4, приемников первого и второго каналов 7 и 8, устройства индикации 26, опорного генератора 3, синтезатора частот 6, блока компенсации траекторных нестабильностей 19, устройств сдвига фазы первого и второго каналов 9 и 10, первого и второго фазовых детекторов первого канала 11 и 12, первого и второго фазовых детекторов второго канала 13 и 14, первого и второго аналого-цифровых преобразователей первого канала 15 и 16, первого и второго аналого-цифровых преобразователей второго канала 17 и 18, первого и второго вычислителей опорной функции первого канала 20 и 21, первого и второго вычислителей опорной функции второго канала 22 и 23, цифровых систем обработки первого и второго каналов 24 и 25, соединенных, как показано на фиг.1.
Передатчик 5 формирует зондирующий сигнал на частоте ω 0 с заданными параметрами (мощность, вид модуляции и т.д.). Передающая антенна 1 предназначена для излучения зондирующего сигнала на частоте ω 0 . Приемные антенны первого и второго каналов 2 и 4 служат для приема эхо-сигналов от ОЭНС на частотах 2ω 0 и 3ω 0 соответственно. Приемники первого и второго каналов 7 и 8 переносят сигналы, принятые на частотах 2ω 0 и 3ω 0 , на промежуточную частоту ω пр и усиливают их. Опорный генератор 3 вырабатывает сигнал стабильной частоты ω ог. Синтезатор частот 6 формирует на своих первом и втором выходах соответственно сигналы несущей ω 0 и промежуточной ω пр частот. Устройства сдвига фазы первого и второго каналов 9 и 10 осуществляют сдвиг фазы опорного сигнала в каждом из каналов на π/2. Первые фазовые детекторы первого и второго каналов 11 и 13 выделяют синусные составляющие сигналов в соответствующих каналах, а вторые фазовые детекторы первого и второго каналов 12 и 14 - косинусные. Первый и второй аналого-цифровые преобразователи каждого канала 15, 16, 17 и 18 предназначены для преобразования аналоговых сигналов в цифровые. Блок компенсации траекторных нестабильностей 19 отслеживает случайные отклонения носителя НРЛС от заданной траектории и формирует соответствующий сигнал рассогласования для коррекции опорной функции. Первые вычислители опорных функций первого и второго каналов 20 и 22 формируют синусные составляющие опорных функций, вторые вычислители опорных функций первого и второго каналов 21 и 23 - косинусные составляющие опорных функций соответствующих каналов с учетом сигналов рассогласования, поступающих из блока компенсации траекториях нестабильностей 19. Цифровые системы обработки первого и второго каналов 24 и 25 служат для формирования РЛИ ОЭНС по сигналам, принятым на частотах 2ω 0 и 3ω 0 . Устройство индикации 26 необходимо для отображения РЛИ с требуемой яркостью, динамическим диапазоном и масштабом.
Заявляемая нелинейная РЛС с синтезированной апертурой антенны работает следующим образом. В течение временного интервала синтезирования апертуры антенны T s обеспечивается прямолинейное движение носителя нелинейной РЛС с постоянной скоростью (наиболее важный для практики случай) . Для обеспечения когерентности сигнал опорного генератора 3 на частоте ω ог подается на вторые входы приемников первого и второго каналов 7 и 8, являющиеся входами внешнего опорного генератора, а также на вход синтезатора частот 6, который формирует сигналы несущей ω 0 и промежуточной ω пр частот. По сигналу на частоте ω 0 , поступающему с первого выхода синтезатора частот 6 на вход передатчика 5, формируется ЗС с требуемыми параметрами на частоте ω 0 . Сформированный таким образом сигнал подается на вход передающей антенны 1 и излучается в заданную область пространства. Сигнал на промежуточной частоте ω пр со второго выхода синтезатора частот 6 поступает на вторые входы первых фазовых детекторов первого и второго каналов 11 и 13, а также на входы устройств сдвига фазы первого и второго каналов 9 и 10. Кроме того, сигнал на промежуточной частоте ω пр поступает также с выхода приемника каждого канала на первый вход первого фазового детектора соответствующего канала. Выходной сигнал устройства сдвига фазы каждого канала 9 и 10 подается на второй вход второго фазового детектора соответствующего канала 12 и 14. Так как опорные сигналы на промежуточной частоте ω пр на вторых входах первого и второго фазовых детекторов каждого канала 11 и 12, 13 и 14 имеют сдвиг по фазе π/2, на выходах первых фазовых детекторов каждого канала 11 и 13 формируются синусные составляющие поступающих из приемников первого и второго каналов 7 и 8 сигналов, а на выходах вторых фазовых детекторов 12 и 14 - косинусные составляющие. Сформированные квадратурные составляющие преобразуются в цифровой вид с помощью первого и второго аналого-цифровых преобразователей каждого канала 15, 17 и 16, 18 и подаются соответственно на первый и второй входы цифровой системы обработки соответствующего канала 24 и 25. Сигнал рассогласования, вырабатываемый блоком компенсации траекторных нестабильностей 19, поступает в каждом из каналов на входы первого и второго вычислителей опорной функции 20, 22 и 21, 23. Первые и вторые вычислители опорной функции каждого канала 20, 22 и 21, 23 формируют соответственно синусную и косинусную составляющие опорной функции, которые поступают соответственно на третий и четвертый входы цифровой системы обработки соответствующего канала 24 и 25. В цифровых системах обработки первого и второго каналов 24 и 25 реализуется известный алгоритм синтезирования апертуры антенны и в результате формируются РЛИ ОЭНС по сигналам, принятым на частотах 2ω 0 и 3ω 0 соответственно. Сформированные таким образом РЛИ поступают с выходов цифровых систем обработки первого и второго каналов 24 и 25 на соответствующие входы устройства индикации 26, с помощью которого производится визуальное отображение РЛИ.
Блок компенсации траекторных нестабильностей может быть выполнен, например, в виде устройства, структурная схема которого приведена на фиг.2.
Блок компенсации траекторных нестабильностей включает генератор тактовых импульсов 1, устройство масштабирования 2, устройство определения направления перемещения по осям прямоугольной системы координат 3, таймер 4, запоминающее устройство 5, блок ключей 6, устройство вычитания 7, блок суммирования 8, блок запоминающих устройств 9, блок масштабирования 10, блок умножения кодов 11, сумматор 12, преобразователь кодов 13, соединенных, как показано на фиг.2.
Генератор тактовых импульсов 1 предназначен для формирования последовательности импульсов заданной длительности τ и с периодом Т и. Таймер 4 служит для поддержания блока ключей 6 в открытом состоянии в течение заданного интервала времени T t . Устройство определения направления перемещения по осям прямоугольной системы координат 3 формирует на первом, втором и третьем выходах сигналы, соответствующие перемещению носителя НРЛС за время Т и вдоль осей абсцисс Δx i , ординат Δy i и аппликат Δz i соответственно, где Блок ключей 6 обеспечивает прохождение сигналов с первого, второго и третьего входов устройства определения направления перемещения по осям прямоугольной системы координат 3 на выход соответствующего ключа блока ключей 6. Блок суммирования 8 служит для суммирования сигналов, имеющихся на первых и вторых входах каждого устройства суммирования блока суммирования 8. Блок запоминающих устройств 9 необходим для хранения результата суммы, полученного в блоке суммирования 8. Блок масштабирования 10 усредняет результаты суммирования сигналов и формирует на первом, втором и третьем выходах сигналы, соответствующие средним значениям перемещений носителя НРЛС вдоль осей абсцисс ординат и аппликат Блок умножения кодов 11 предназначен для возведения в квадрат значений и Сумматор 12 служит для реализации математической операции ![]()
Преобразователь кодов 13 выполняет математическую операцию вычисления средней скорости перемещения носителя НРЛС

Устройство масштабирования 2 необходимо для вычисления эталонного значения перемещения носителя НРЛС вдоль оси абсцисс ![]() В запоминающем устройстве 5 хранится полученное значение Δx 0 . В устройстве вычитания 7 осуществляется математическая операция вычитания значения текущего перемещения носителя НРЛС вдоль оси абсцисс прямоугольной системы координат Δx i из эталонного значения Δх 0 .
В запоминающем устройстве 5 хранится полученное значение Δx 0 . В устройстве вычитания 7 осуществляется математическая операция вычитания значения текущего перемещения носителя НРЛС вдоль оси абсцисс прямоугольной системы координат Δx i из эталонного значения Δх 0 .
Блок компенсации траекторных нестабильностей работает следующим образом. Сначала измеряется средняя скорость движения носителя НРЛС.
Включение режима измерения скорости осуществляется вручную с помощью включения таймера 4, по окончании работы которого производится автоматическое отключение, т.е. продолжительность режима измерения значения определяется временем T t . В режиме измерения средней скорости тактовые импульсы длительностью τ и с периодом Т и, вырабатываемые генератором тактовых импульсов 1, поступают на вход устройства определения направления перемещения по осям прямоугольной системы координат 3, которое при движении носителя НРЛС формирует на своих первом, втором и третьем выходах значение перемещений вдоль осей абсцисс Δx i , ординат Δу i и аппликат Δz i соответственно. В течение времени T t сигнал с выхода таймера 4 поддерживает блок ключей 6 в открытом состоянии, в результате чего сигналы с первого, второго и третьего выходов устройства определения направления перемещения по осям прямоугольной системы координат 3, поступающие на первые входы соответствующих ключей блока ключей 6, подаются на первые входы соответствующих устройств суммирования блока суммирования 8. Блок суммирования 8 совместно с блоком запоминающих устройств 9 суммируют цифровые коды перемещений вдоль осей абсцисс, ординат и аппликат, которые затем с выходов первого, второго и третьего запоминающих устройств второго блока запоминающих устройств 9 соответственно поступают на входы соответствующих устройств масштабирования блока масштабирования 10, в которых осуществляется умножение поступивших сигналов на цифровой код величины и получение в результате средних значений перемещений за интервал времени Т и вдоль осей абсцисс ординат и аппликат Полученные таким образом сигналы поступают затем в блок умножения кодов 11 и сумматор 12 с целью получения суммы квадратов указанных сигналов ![]() которая поступает в преобразователь кодов 13, где в соответствии с (1) преобразуется в значение средней скорости Полученное значение подается на вход устройства масштабирования 2, где путем его умножения на величину Т и формируется эталонное значение перемещения носителя НРЛС вдоль оси абсцисс
которая поступает в преобразователь кодов 13, где в соответствии с (1) преобразуется в значение средней скорости Полученное значение подается на вход устройства масштабирования 2, где путем его умножения на величину Т и формируется эталонное значение перемещения носителя НРЛС вдоль оси абсцисс ![]() Сигнал Δx 0 с выхода устройства масштабирования 2 поступает на вход запоминающего устройства 5, где запоминается и хранится до момента следующего определения средней скорости По окончании измерения при функционировании нелинейной РЛС с синтезированной апертурой антенны, сигнал Δх 0 с выхода запоминающего устройства 5 подается на первый вход устройства вычитания 7, на второй вход которого поступает сигнал с первого выхода устройства определения направления перемещения по осям прямоугольной системы координат 3. В устройстве вычитания 7 осуществляются математические операции формирования сигналов, пропорциональных отклонению параметров движения носителя НРЛС вдоль оси абсцисс прямоугольной системы координат от заданных параметров опорной траектории δx i =Δx 0 -Δx i .
Сигнал Δx 0 с выхода устройства масштабирования 2 поступает на вход запоминающего устройства 5, где запоминается и хранится до момента следующего определения средней скорости По окончании измерения при функционировании нелинейной РЛС с синтезированной апертурой антенны, сигнал Δх 0 с выхода запоминающего устройства 5 подается на первый вход устройства вычитания 7, на второй вход которого поступает сигнал с первого выхода устройства определения направления перемещения по осям прямоугольной системы координат 3. В устройстве вычитания 7 осуществляются математические операции формирования сигналов, пропорциональных отклонению параметров движения носителя НРЛС вдоль оси абсцисс прямоугольной системы координат от заданных параметров опорной траектории δx i =Δx 0 -Δx i .
Потенциальное улучшение К угловой разрешающей способности НРЛС при синтезировании апертуры антенны было теоретически исследовано в соответствии с выражением
где Δl p и Δl - соответственно угловые разрешающие способности НРЛС без использования и с использованием алгоритма синтезирования апертуры антенны; λ ЗС - длина волны ЗС; R - расстояние между НРЛС и ОЭНС; d - размер реальной приемной антенны; - номер гармоники ЗС; - скорость движения носителя НРЛС; θ н - угол наблюдения ОЭНС. Расчеты, проведенные для случая использования в нелинейном локаторе «Люкс» метода синтезирования апертуры антенны при размерах реальных приемных антенн d=0,25 м для режима бокового обзора пространства (θ н =π/2), а также при ![]() T s =2 с, R=3 м, λ ЗС =0,3 м, свидетельствуют об улучшении углового разрешения на второй и третьей гармониках ЗС в 32 и 48 раз соответственно.
T s =2 с, R=3 м, λ ЗС =0,3 м, свидетельствуют об улучшении углового разрешения на второй и третьей гармониках ЗС в 32 и 48 раз соответственно.
Эффективность функционирования блока компенсации траекторных нестабильностей можно оценить, воспользовавшись оценкой искажений РЛИ ОЭНС при отсутствии компенсации траекторных нестабильностей для случая прямолинейного равномерного движения носителя вдоль координаты х при фиксированных координатах у=у 0 , z=z 0 . В этих целях рассчитаем импульсные отклики нелинейной РЛС с синтезированной апертурой антенны (РЛИ ОЭНС) для случаев отсутствия и наличия случайных отклонений носителя НРЛС от заданной траектории

где U(t+τ) - траекторный сигнал; T s - временной интервал СА антенны; τ - временной сдвиг; h(t) - опорная функция.
В качестве опорной h(t) выбирается взвешенная функция, комплексно сопряженная с сигналом, отраженным от нелинейной цели
где H(t) - действительная весовая функция;  - изменение текущего расстояния между НРЛС и ОЭНС.
- изменение текущего расстояния между НРЛС и ОЭНС.
Полагая в случае компенсации траекторных нестабильностей δx 1 =0, а в случае ее отсутствия - ![]() и задаваясь, например, значениями H(t)=1,
и задаваясь, например, значениями H(t)=1, ![]() T s =2 с, R=3 м, λ ЗС =0,3 м, n=2, х=1 м, x 0 =0 м, получим в соответствии с (3) импульсные отклики J 1 (r) и представленные после нормировки соответствующими графическими зависимостями 1 и 2 на фиг.3. Как показывает расчет, ширина главного лепестка импульсного отклика в 1,15 раза больше, чем J 1 (τ). Это означает, что блок компенсации траекторных нестабильностей, выполненный в виде устройства, структурная схема которого приведена на фиг.2, при заданных условиях позволяет улучшить разрешающую способность нелинейной РЛС с синтезированной апертурой антенны по угловой координате на 15%.
T s =2 с, R=3 м, λ ЗС =0,3 м, n=2, х=1 м, x 0 =0 м, получим в соответствии с (3) импульсные отклики J 1 (r) и представленные после нормировки соответствующими графическими зависимостями 1 и 2 на фиг.3. Как показывает расчет, ширина главного лепестка импульсного отклика в 1,15 раза больше, чем J 1 (τ). Это означает, что блок компенсации траекторных нестабильностей, выполненный в виде устройства, структурная схема которого приведена на фиг.2, при заданных условиях позволяет улучшить разрешающую способность нелинейной РЛС с синтезированной апертурой антенны по угловой координате на 15%.
Таким образом, в предложенной нелинейной РЛС с синтезированной апертурой антенны повышается угловая разрешающая способность за счет формирования антенного раскрыва больших размеров на заданной траектории перемещения носителя НРЛС, а блок компенсации траекторных нестабильностей, выполненный в виде устройства, структурная схема которого приведена на фиг.2, обеспечивает потенциально достижимую угловую разрешающую способность (ее потенциальное улучшение в соответствии с выражением (2)) за счет уменьшения искажений РЛИ, обусловленных расширением главного лепестка импульсного отклика (3).
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений неизвестна нелинейная РЛС с синтезированной апертурой антенны, отличающаяся от известной НРЛС, состоящей из передатчика, передающей антенны и двух идентичных каналов обработки сигналов на частотах второй 2ω 0 и третьей 3ω 0 гармоник ЗС, каждый из которых содержит последовательно соединенные приемную антенну и приемник, а также устройства индикации, тем, что дополнительно введены опорный генератор, синтезатор частот и блок компенсации траекторных нестабильностей, предназначенный для формирования соответствующего корректирующего сигнала рассогласования на основании измеренной средней скорости движения и случайных отклонений носителя нелинейной РЛС от заданной траектории, а в каждый из каналов - устройство сдвига фазы, первый и второй фазовые детекторы, первый и второй аналого-цифровые преобразователи, первый вычислитель опорной функции, предназначенный для формирования синусной составляющей опорной функции, второй вычислитель опорной функции, предназначенный для формирования косинусной составляющей опорной функции, цифровая система обработки, при этом выход опорного генератора подключен ко входу синтезатора частот и ко вторым входам приемников первого и второго канала, первый выход синтезатора частот подключен ко входу передатчика, выход которого соединен со входом передающей антенны, второй выход синтезатора частот подключен в каждом канале ко второму входу первого фазового детектора и входу устройства сдвига фазы, выход устройства сдвига фазы каждого канала соединен со вторым входом второго фазового детектора соответствующего канала, выход приемника каждого канала подключен к первым входам первого и второго фазовых детекторов соответствующего канала, выходы которых соединены соответственно со входами первого и второго аналого-цифровых преобразователей соответствующих каналов, выходы которых в каждом из каналов подключены соответственно к первому и второму входам цифровой системы обработки соответствующего канала, входы первого и второго вычислителей опорной функции каждого канала соединены с выходом блока компенсации траекторных нестабильностей, выходы первого и второго вычислителей опорной функции каждого канала подключены соответственно к третьему и четвертому входам цифровой системы обработки соответствующего канала, выходы цифровых систем обработки первого и второго каналов соединены соответственно с первым и вторым входами устройства индикации, а блок компенсации траекторных нестабильностей содержит генератор тактовых импульсов, устройство масштабирования, устройство определения направления перемещения по осям прямоугольной системы координат на основании измеренной средней скорости движения и случайных отклонений носителя нелинейной РЛС от заданной траектории, таймер, запоминающее устройство, блок ключей, состоящий из трех ключей, устройство вычитания, блок суммирования, состоящий из трех устройств суммирования, блок запоминающих устройств, состоящий из трех запоминающих устройств, блок масштабирования, состоящий из трех устройств масштабирования, блок умножения кодов, состоящий из трех умножителей кодов, сумматор и преобразователь кодов, при этом генератор тактовых импульсов и устройство определения направления перемещения по осям прямоугольной системы координат соединены последовательно, сумматор, преобразователь кодов, устройство масштабирования и запоминающее устройство соединены последовательно, кроме того, первый, второй и третий выходы устройства определения направления перемещения по осям прямоугольной системы координат подключены к первым входам соответствующих ключей блока ключей, вторые входы которых соединены с выходом таймера, первый выход устройства определения направления перемещения по осям прямоугольной системы координат соединен также со вторым входом устройства вычитания, выходы первого, второго и третьего ключей блока ключей соединены с первыми входами соответствующих устройств суммирования блока суммирования, выходы которых подключены ко входам соответствующих запоминающих устройств блока запоминающих устройств, выходы которых соединены со вторыми входами соответствующих устройств суммирования блока суммирования и со входами соответствующих устройств масштабирования блока масштабирования, выход каждого устройства масштабирования блока масштабирования подключен к первому и второму входам соответствующих умножителей кодов блока умножения кодов, выходы первого, второго и третьего умножителей кодов блока умножения кодов соединены с соответствующими входами сумматора, выход запоминающего устройства подключен к первому входу устройства вычитания, а выход устройства вычитания, второй и третий выходы устройства определения направления перемещения по осям прямоугольной системы координат, выход преобразователя кодов являются соответственно первым, вторым, третьим и четвертым выходами блока компенсации траекторных нестабильностей.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что нелинейная РЛС с синтезированной апертурой антенны позволяет достичь угловой разрешающей способности, близкой к потенциальной.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы типовые радиотехнические узлы и устройства, применяемые в РСА , а также оборудование и материалы СВЧ-диапазона широко распространенной технологии .
Блок компенсации траекторных нестабильностей может быть выполнен с использованием типовых импульсных и цифровых устройств .
Так, устройство определения направления перемещения по осям прямоугольной системы координат может быть выполнено, например, на базе оптического манипулятора типа «мышь» при условии фиксации координаты у=у 0 =h 0 , где h 0 - высота размещения плоской поверхности для перемещения оптического манипулятора типа «мышь» над уровнем пола в помещении, где используется нелинейная РЛС с синтезированной апертурой антенны. Генератор тактовых импульсов может быть построен как транзисторный блокинг-генератор или как блокинг-генератор на интегральных микросхемах . Для реализации блока ключей могут быть избраны транзисторные ключи . Таймер выполняется однотактным . Основой запоминающего устройства и блока запоминающих устройств могут служить полупроводниковые оперативные или постоянные запоминающие устройства. Сумматор и блок суммирования могут быть построены с использованием схемы сумматора параллельного действия . Блок масштабирования, устройство масштабирования и преобразователь кодов могут быть выполнены по известной схеме преобразователя кодов . Устройство вычитания предполагается построить на базе сумматоров, осуществляющих вычитание . Блок умножения кодов выполняется на базе известных устройств для умножения кодов .
Источники информации
1. Антипов В.Н., Горяинов В.Т., Кулин А.Н. и др. Радиолокационные станции с цифровым синтезированием апертуры антенны. / Под ред. В.Т.Горяинова. - М.: Радио и связь, 1988.
2. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. - М.: Радиотехника, 2005.
3. Нелинейный локатор «Люкс». Техническое описание и инструкция по эксплуатации. - М.: Новоком, 2005.
4. Горбачев А.А., Колданов А.П., Ларцов С. В., Тараканков С.П., Чигин Е.П. Признаки распознавания нелинейных рассеивателей электромагнитных волн // Нелинейная радиолокация. Сборник статей. Часть 1. / Под. Ред. Горбачева А.А., Колданова А.П., Потапова А.А., Чигина Е.П. - М.: Радиотехника, 2005. - С.15-23.
5. Семенов Д.В., Ткачев Д.В. Нелинейная радиолокация: концепция NR // Специальная техника. / НИИ специальной техники МВД России, 1999, №1-2. - С.17-22.
6. Кондратенков Г.С., Потехин В.А., Реутов А.П., Феоктистов Ю.А. Радиолокационные станции обзора Земли. / Под ред. Г.С.Кондратенкова. - М.: Радио и связь, 1983.
7. Гольденберг Л.М. Импульсные и цифровые устройства: Учебник для институтов связи. - М.: Связь, 1973.
8. Лебедев О.Н., Сидоров А.М. Импульсные и цифровые устройства: Цифровые узлы и их проектирование на микросхемах. - Л.: ВАС, 1980.
9. Справочник по радиолокации. / Под ред. М.Сколника, Нью-Йорк, 1970: Пер. с англ. (в четырех томах). / Под общей ред. К.Н.Трофимова; Том 2. Радиолокационные антенные устройства. - М.: Сов. радио, 1979.
10. Дулин В.Н. Электронные и квантовые приборы СВЧ: Учебное пособие для студентов высших технических учебных заведений. Издание 2-е, переработанное. - М.: Энергия, 1972.
11. С точки зрения оптических мышей…//URL:http://www.iXBT.com.
12. Симонович С.В. и др. Большая книга персонального компьютера. - М.: ОЛМА Медиа Груп, 2007.
13. Браммер Ю.А. Импульсные и цифровые устройства: Учеб. для студентов электрорадиоприборостроительных сред. спец. учеб. заведений. / Ю.А.Браммер, И.Н.Пащук. - 6-е изд., перераб. и доп. - М.: Высшая школа, 2002.
Нелинейная радиолокационная станция (РЛС) с синтезированной апертурой антенны, состоящая из передатчика, передающей антенны и двух идентичных каналов обработки сигналов на частотах второй 2ω 0 и третьей 3ω 0 гармоник зондирующего сигнала (ЗС), каждый из которых содержит последовательно соединенные приемную антенну и приемник, а также устройство индикации, отличающаяся тем, что дополнительно введены опорный генератор, синтезатор частот и блок компенсации траекторных нестабильностей, предназначенный для формирования соответствующего корректирующего сигнала рассогласования на основании измеренной средней скорости движения и случайных отклонений носителя нелинейной РЛС от заданной траектории, а в каждый из каналов - устройство сдвига фазы, первый и второй фазовые детекторы, первый и второй аналого-цифровые преобразователи, первый вычислитель опорной функции, предназначенный для формирования синусной составляющей опорной функции, второй вычислитель опорной функции, предназначенный для формирования косинусной составляющей опорной функции, цифровая система обработки, предназначенная для формирования радиолокационного изображения объекта с нелинейными электрическими свойствами, при этом выход опорного генератора подключен ко входу синтезатора частот и ко вторым входам приемников первого и второго канала, первый выход синтезатора частот подключен ко входу передатчика, выход которого соединен со входом передающей антенны, второй выход синтезатора частот подключен в каждом канале ко второму входу первого фазового детектора и входу устройства сдвига фазы, выход устройства сдвига фазы каждого канала соединен со вторым входом второго фазового детектора соответствующего канала, выход приемника каждого канала подключен к первым входам первого и второго фазовых детекторов соответствующего канала, выходы которых соединены соответственно со входами первого и второго аналого-цифровых преобразователей соответствующих каналов, выходы которых в каждом из каналов подключены соответственно к первому и второму входам цифровой системы обработки соответствующего канала, входы первого и второго вычислителей опорной функции каждого канала соединены с выходом блока компенсации траекторных нестабильностей, выходы первого и второго вычислителей опорной функции каждого канала подключены соответственно к третьему и четвертому входам цифровой системы обработки соответствующего канала, выходы цифровых систем обработки первого и второго каналов соединены соответственно с первым и вторым входами устройства индикации, а блок компенсации траекторных нестабильностей содержит генератор тактовых импульсов, устройство масштабирования, устройство определения направления перемещения по осям прямоугольной системы координат на основании измерений средней скорости движения и случайных отклонений носителя нелинейной РЛС от заданной траектории, таймер, запоминающее устройство, блок ключей, состоящий из трех ключей, устройство вычитания, блок суммирования, состоящий из трех устройств суммирования, блок запоминающих устройств, состоящий из трех запоминающих устройств, блок масштабирования, состоящий из трех устройств масштабирования, блок умножения кодов, состоящий из трех умножителей кодов, сумматор и преобразователь кодов, при этом генератор тактовых импульсов и устройство определения направления перемещения по осям прямоугольной системы координат соединены последовательно, сумматор, преобразователь кодов, устройство масштабирования и запоминающее устройство соединены последовательно, кроме того, первый, второй и третий выходы устройства определения направления перемещения по осям прямоугольной системы координат подключены к первым входам соответствующих ключей блока ключей, вторые входы которых соединены с выходом таймера, первый выход устройства определения направления перемещения по осям прямоугольной системы координат соединен также со вторым входом устройства вычитания, выходы первого, второго и третьего ключей блока ключей соединены с первыми входами соответствующих устройств суммирования блока суммирования, выходы которых подключены ко входам соответствующих запоминающих устройств блока запоминающих устройств, выходы которых соединены со вторыми входами соответствующих устройств суммирования блока суммирования и со входами соответствующих устройств масштабирования блока масштабирования, выход каждого устройства масштабирования блока масштабирования подключен к первому и второму входам соответствующих умножителей кодов блока умножения кодов, выходы первого, второго и третьего умножителей кодов блока умножения кодов соединены с соответствующими входами сумматора, выход запоминающего устройства подключен к первому входу устройства вычитания, а выход устройства вычитания, второй и третий выходы устройства определения направления перемещения по осям прямоугольной системы координат, выход преобразователя кодов являются соответственно первым, вторым, третьим и четвертым выходами блока компенсации траекторных нестабильностей.
Техническое задание
Разработать РТС :
Тип РТС ……………....самолётная;
Назначение. ……………РЛС бокового обзора с синтезированной апертурой;
Тактико-технические характеристики разрабатываемой РТС:
1 Анализ технического задания
В самолётных РЛС существуют жёсткие ограничения на габариты антенн, что препятствует достижению разрешающей способности по азимуту.
Для преодоления этого препятствия используют один из двух методов, реализуемых в РЛС бокового обзора. В первом случае антенна располагается вдоль фюзеляжа, что позволяет существенно увеличить её размеры и улучшить за счёт этого разрешающую способность. При втором методе используется искусственное увеличение размеров антенны за счет, так называемого, синтезирования апертуры.
По техническому заданию требуется разработать самолётную РЛС бокового обзора с синтезированной апертурой. В таких РЛС антенна больших размеров устанавливается неподвижно вдоль фюзеляжа самолёта. Луч антенной системы направлен перпендикулярно оси самолёта. Обычно устанавливаются две антенны, лучи которых направлены вправо и влево от направления полета. Просмотр заданного участка земной поверхности происходит благодаря перемещению самого летательного аппарата во время полёта (рисунок 1).
 |
Рисунок 1 – Принцип обзора пространства в направлении, перпендикулярном оси самолёта.
Принцип работы РЛС с синтезированием апертуры (РСА) основан на создании эквивалентных апертур с увеличенной эффективной длиной, что достигается с помощью специальных методов обработки сигналов, а не увеличением физических размеров апертуры реальной антенны. В РСА используется всего один излучающий антенны элемент (реальная антенна), который последовательно занимает положение вдоль траектории полёта. В каждом из этих положений излучаются и принимаются сигналы (Рисунок 2).
Отраженные от целей сигналы как амплитуда, так и фаза принятых сигналов.запоминаются в устройстве памяти,

Рисунок 2 – Принцип формирования искусственного (синтезированного) раскрыва.
После результирующего перемещения излучающего элемента на величину сигналы в запоминающем устройстве становятся весьма схожими с сигналами, которые принимались элементами реальной линейной решётки. Если сигналы в ЗУ обрабатывать по такому же алгоритму, что и при формировании реальной линейной решётки, то получим эффект приёма сигналов на антенну больших размеров (метод «синтезирования апертуры»).
Кроме того, в РСА сигналы в ЗУ можно селектировать по дальности и при необходимости сигналы разных дальностей можно обрабатывать различным образом (фокусировка).
При развороте самолет начинает крениться, в результате чего возникает ошибка измерения высоты. Чтобы исключить ошибку необходимо закрепить антенну на балансирующем устройстве, в результате работы которого главный лепесток диаграммы направленности антенны направляется перпендикулярно земной поверхности.
Обычно в РТС бокового обзора используют сигнал с импульсной модуляцией.
Антенна имеет косекансную диаграмму направленности.
Для того чтобы не ухудшать аэродинамических свойств самолета, антенну помещают под специальный обтекатель, который не препятствуют прохождению радиосигнала. В расчетах необходимо учесть, что самолет находится над разными типами земной поверхности, которые обладают различными отражающими свойствами.
2 Особенности построения некоторых блоков РЛС с синтезированной апертурой.
Антенна
Горизонтальный размер апертуры антенны РСЛ определяет линейную разрешающую способность по азимуту, практически достижимую в РЛС с синтезированием апертуры. При обработке сигналов принимается, что КНД реальной антенны при пролёте летательного аппарата остаётся постоянным. Следовательно, необходимо иметь стабилизацию ДН антенны, чтобы остаточные колебания луча были значительно меньше ширины ДН. В большинстве случаев антенна устанавливается в боковом направлении.
Приёмопередатчик
В РЛС с синтезированием апертуры должен обеспечивать высокую когерентность сигналов. Следовательно, предъявляются более жесткие требования к стабильности частоты генераторов и параметров элементов. Выходной сигнал когерентной РЛС представляет собой напряжение на выходе синхронного детектора. Выходной сигнал является биполярным видеосигналом, в котором уровень опорного смещения соответствует нулевому смещению сигнала.
Запись сигналов и запоминание.
Характерной особенностью РСА является необходимость запоминания принимаемых сигналов, так как необходимые для формирования синтезированной ДН сигналы поступают на вход не одновременно, а на протяжении определённого интервала времени. Обработка запомненных сигналов и позволяет получить высокую разрешающую способность. Один и тот же сигнал используется для формирования выходных сигналов для большого числа точек радиолокационного изображения. Требования к ёмкости устройств памяти весьма высоки. В РЛС с высокой разрешающей способностью требуется большой объём памяти, поэтому в них обычно используют фотографическое запоминающее устройство.
ОБРАБОТКА ИНФОРМАЦИИ И УПРАВЛЕНИЕ X
УДК 621.396.96
НАПРАВЛЕНИЯ РАЗВИТИЯ РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ КОСМИЧЕСКОГО БАЗИРОВАНИЯ
О. Л. Полончик,
канд. техн. наук, доцент
Северный (Арктический) федеральный университет им. М. В. Ломоносова, г. Архангельск
Проанализированы основные направления развития радиолокационных систем контроля земной поверхности космического базирования. Определена предметная область использования радиолокационных технических средств, в том числе и для решения прикладных задач развития экономики северных и арктических регионов России. Выполнена сравнительная оценка существующих способов обзора земной поверхности. Предлагается новый метод построения бортовых радиолокационных систем на базе космических аппаратов со стабилизацией вращением. Рассмотрены пути улучшения технических характеристик бортового радиолокатора.
Ключевые слова - РЛС бокового обзора, диаграмма направленности, механическое сканирование, синтезирование апертуры.
Введение
Современные бортовые радиолокационные средства представляют одно из наиболее интенсивно развивающихся направлений радиоэлектронной техники. Особое место среди них занимают бортовые радиолокаторы с синтезированием апертуры. Данные технические средства производят зондирование земной поверхности в любое время суток, сезона и года, не зависят от климатических условий и наличия облачности, что особенно важно для районов с незначительным количеством солнечных дней в году. В Российской Федерации к ним относятся обширные площади на севере страны и в Арктике, составляющие почти третью часть территории нашего государства, очень богатую разнообразными полезными ископаемыми, нефтью и газом.
Решение важнейших народнохозяйственных задач, таких как высокоточная оценка рельефа местности, формирование трехмерных изображений земной поверхности, исследование динамических процессов на земной и морской поверхности, возлагается на перспективные средства дистанционного зондирования Земли .
Особенно актуальным для решения задач устойчивого развития северных и арктических регионов является получение материалов радиолокационной съемки с высокими измерительными свойствами, обеспечивающих создание и обновление государственных топографических карт,
планов и картографической основы государственного кадастра недвижимости.
Получение информации о состоянии этих районов представляет задачу исключительной важности и позволит минимизировать материальные потери.
История развития радиолокационных средств дистанционного зондирования Земли
Развитие бортовых радиолокационных станций (РЛС) привело к созданию радиолокационных систем кругового обзора, основным недостатком которых была низкая разрешающая способность. Дальнейшие исследования по совершенствованию РЛС обзора земной поверхности были направлены на преодоление основного ограничения в увеличении разрешающей способности, связанного с размерами антенных устройств.
Детальность радиолокационного изображения зависит от линейной разрешающей способности (разрешающей способности по дальности) радиолокатора, которая в радиальном направлении определяется зондирующим сигналом, в поперечном направлении (тангенциальная разрешающая способность) - шириной диаграммы направленности (ДН) и расстоянием до цели.
Задача увеличения разрешающей способности по дальности решается использованием зондирующих сигналов с малой длительностью им-
Летательный аппарат
пульсов или переходом к сложным сигналам - частотно-модулированным либо фазоманипули-рованным.
Повышение тангенциальной разрешающей способности достигается применением в бортовом радиолокаторе антенны, расположенной вдоль фюзеляжа самолета, или синтезированием апертуры антенны при движении летательного аппарата.
Первый путь привел к разработке радиолокаторов бокового обзора . Схема реализации метода представлена на рис. 1. В таких радиолокаторах тангенциальная разрешающая способность тем выше, чем больше продольный размер фюзеляжа летательного аппарата, хотя зависимость от дальности сохраняется.
Разрешающая способность у РЛС этого типа была увеличена примерно в 10 раз по сравнению с панорамными РЛС кругового обзора. И все же эти станции по своим возможностям еще существенно уступают оптическим устройствам.
Вторым, более кардинальным путем является создание радиолокаторов с синтезированием апертуры (РСА) при поступательном движении летательного аппарата.
Огромный вклад в развитие теории РСА внесли известные отечественные ученые А. П. Реутов, Г. С. Кондратенков, П. И. Дудник, Ю. Л. Феоктистов, Н. И. Буренин, Ю. А. Мельник, В. А. Поте-хин и др.
Радиолокаторы с синтезированием апертуры
Сущность метода заключается в излучении РЛС, установленной на подвижном носителе (самолете, космическом аппарате (КА) или беспилотном летательном аппарате), когерентных зондирующих сигналов, приеме соответствующих отраженных сигналов вдоль прямолинейной траектории полета носителя, их запоминании и сложении. В результате сложения принимаемых
сигналов осуществляется сжатие антенного луча и существенно повышается разрешающая способность РЛС вдоль линии пути носителя.
В зависимости от того, компенсируются или нет фазовые набеги при суммировании сигналов, различают фокусированные и несфокусированные РСА. В первом случае обработка сводится к перемещению антенны, запоминанию сигналов, компенсации фазовых набегов и суммированию сигналов, во втором - к тем же операциям, но без компенсации фазовых набегов.
Потенциальная разрешающая способность таких станций приближается к характеристикам оптических средств наблюдения. Эти РЛС дают возможность реализовать высокую линейную разрешающую способность, независимую от дальности наблюдения и длины волны зондирующего сигнала.
В настоящее время существуют три основных режима съемки земной поверхности (рис. 2): маршрутный, обзорный и прожекторный (детальный) .
Современные системы позволяют получать снимки земной поверхности и расположенных на ней объектов с разрешениями порядка 1 м для обзорного и 0,3 м для прожекторного режимов. Существенное влияние на результирующие характеристики РСА оказывают применяемые методы цифровой обработки принятого сигнала .
В маршрутном режиме съемка земной поверхности производится непрерывно в полосе захвата. Сигнал накапливается в течение времени, равного расчетному интервалу синтезирования апертуры антенны для данных условий полета носителя РЛС.
Обзорный режим съемки отличается от маршрутного тем, что съемка непрерывно ведется на всей ширине полосы обзора полосами, равными ширине полосы захвата. Шесть лучей последовательно переключаются по углу места для просмотра всей полосы обзора (рис. 3).
Разделяют боковой и переднебоковой режим в зависимости от ориентации главного лепестка
Прожекторный
ДН антенны. Накопление сигнала осуществляется в течение времени, равного расчетному интервалу синтезирования апертуры антенны для данных условий полета носителя РЛС.
При съемке в прожекторном режиме накопление сигнала происходит на увеличенном, по сравнению с обзорным режимом, интервале. Расширение интервала достигается перемещением главного лепестка ДН антенны, а облучаемый участок постоянно находится в зоне съемки. Это перемещение синхронизировано с движением носителя РЛС.
Для удержания пятна ДН на одном и том же участке поверхности четыре луча последовательно переключаются по азимуту (рис. 4).
Таким образом, анализ основных режимов съемки земной поверхности методом РСА показывает, что:
1) при методе бокового обзора максимальная ширина полосы просматриваемой подстилающей поверхности аналогична ширине просмотра;
2) увеличение линейной разрешающей способности в прожекторном режиме достигается увеличением апертуры, при этом просматриваемая полоса сужается;
3) увеличение линейной разрешающей способности в обзорном режиме осуществляется применением совокупности узконаправленных ДН.
Минимальная линейная разрешающая способность по азимуту 8хш1п для антенн с несфокусированным искусственным раскрывом определяется соотношением
Линейное разрешение по азимуту РЛС с фокусированным искусственным раскрывом определяется выражением
5х - ©Я0 - ^,
где йа - размер раскрыва антенны в заданной плоскости.
Радиолокационная станция с фокусированным искусственным раскрывом позволяет получить, в отличие от несфокусированного, линейное разрешение по азимуту, не зависящее от дальности и длины волны зондирующего сигнала. Разрешающая способность таких РЛС увеличивается с уменьшением размера реальной антенны. Это является существенным преимуществом РСА по сравнению с другими методами зондирования земной поверхности.
Радиолокаторы бокового обзора. Основные соотношения
Определение местоположения цели при боковом обзоре производится в системе координат: путевая дальность х, наклонная дальность Я.
При боковом обзоре ДН антенны перпендикулярна вектору путевой скорости носителя. Определение положения целей на местности осуществляется в прямоугольной системе координат хЯ. Зона обзора представляет собой полосу, параллельную траектории полета носителей (рис. 5, а). Ширина полосы определяется дальностью действия РЛС.
Возможна ориентация ДН антенны под углом к вектору путевой скорости, отличном от л/2.
■ Рис. 4. Прожекторный режим
■ Рис. 5. Схема бокового обзора в прямоугольной (а) и косоугольной (б) системе координат
При этом сужается зона обзора, цели могут обнаруживаться с упреждением (рис. 5, б). В этом случае обзор местности осуществляется в косоугольной системе координат.
Известно, что разрешающая способность РЛС обзора земной поверхности по горизонтальной дальности непосредственно под носителем ухудшается по сравнению с предельной, определяемой длительностью зондирующего импульса . Поэтому за ближайшую границу полосы обзора, где разрешающая способность по дальности ухудшается несущественно, обычно принимают высоту полета носителя.
Метод описывается следующими характеристиками:
Временем облучения;
Дальностью радиолокационного обнаружения;
Разрешающей способностью.
Время облучения
Ттйё _ Щ ’
где © - угловая ширина ДН антенны РЛС в горизонтальной плоскости; W - проекция скорости по направлению пути.
Характерной чертой метода бокового обзора является одноразовое облучение целей. При направлении наблюдения, перпендикулярном вектору путевой скорости, изображение формируется только на траверзе траектории полета.
Второй чертой является увеличение времени облучения цели пропорционально дальности. Это приводит к тому, что энергия отраженных от целей сигналов возрастает с увеличением дальности цели.
Определим дальность радиолокационного обнаружения для случая бокового обзора.
Известно, что дальность обнаружения цели (фона местности) Д0 с эффективной отражающей поверхностью ст при использовании одной приемопередающей антенны имеет вид
64л к0кГоц
где Э - энергия облучения цели; в - коэффициент направленного действия антенны; X - длина волны передатчика РЛС; £ш - коэффициент шума приемного устройства; £ - постоянная Больцмана; Т0 - абсолютная температура (обычно 280 К); "Л = Эс тт/^ш - требуемое значение коэффициента различимости приемного устройства РЛС. Здесь Эс т1п - пороговое значение энергии принимаемого отраженного сигнала, характеризующее чувствительность приемного устройства РЛС; Ыш - спектральная плотность шума на входе приемника: Ыш = £ш£Т0.
Энергия облучения цели (элемента местности) определяется соотношением
V - £Пэ^таё>
где Рср - средняя мощность излучаемого сигнала.
С учетом соотношения для энергии облучения цели получаем формулу для дальности в методе бокового обзора
Рпа©0С2стХ2
64л 1Ак0к7О"п
Анализ выражения показывает наличие возможности увеличить радиус дальности действия рассмотренного метода по сравнению с круговым обзором.
РЛС кругового обзора с синтезированием апертуры на базе КА со стабилизацией вращением. Основные соотношения
Для реализации такого метода просмотра земной поверхности необходимы КА со стабилизацией вращением, РЛС с параболической антенной. ДН антенны имеет относительно местной вертикали угол наклона.
Антенна РЛС за счет кругового вращения корпуса КА, к которому она жестко прикреплена, сканирует подстилающую земную поверхность. Вид проекции ДН антенны в азимутальной и угломестной плоскости на земную поверхность представлен на рис. 6 и 7.
Энергетика РЛС в методе лучше по сравнению с РСА, так как используется более узкая ДН смещенной антенны. Она определяется выбором минимального и максимального угла места наклона ДН антенны.
Рассмотрим положение антенны РЛС в различные моменты времени (рис. 8). Антенна при
Проекция ДН антенны
■ Рис. 6. Вид проекций ДН антенны РЛС на земную поверхность в азимутальной плоскости: Оа - угловая скорость вращения антенны РЛС КА в азимутальной плоскости; Ятах - максимальное расстояние до цели Ц^ V - скорость движения КА
■ Рис. 7. Просмотр полосы обзора антенной РЛС КА
■ Рис. 8. Положения антенны РЛС КА в плоскости вращения в различные моменты времени с учетом поступательного движения и вращения: I - расстояние, которое пролетает КА за полпериода вращения
вращении вокруг местной вертикали с учетом путевой скорости последовательно занимает эти положения (точки 1, 2, 3 и т. д.). Радиус вращения антенны незначителен (порядка нескольких метров). КА движется с первой космической скоростью, и кривая движения антенны превращается практически в прямую за временной промежуток, равный половине периода вращения.
В каждой точке этой кривой электрическая ось антенны будет перпендикулярна к ней. Появляется возможность синтезировать искусственную апертуру.
Местоположение определяется в полярной системе координат. Измеряются дальность R и азимут ß. Высота полета H и угол места у определяются. Азимут цели отсчитывается от направления движения (см. рис. 6).
Радиолокационное наблюдение производят в определенной области пространства, которая называется рабочей зоной, или зоной обзора РЛС. Размеры рабочей зоны определяются интервалами обзора по дальности Rmax - Rmin, азимуту «max - amin, углу места ßmax - ßmin и радиальной скорости Vr max - Vr min. Протяженность каждого указанного интервала определяется числом содержащихся в нем элементов разрешения РЛС по соответствующей координате.
Информацию о наличии целей в различных элементах разрешения рабочей зоны получают в процессе обзора (просмотра) этих элементов. Очередность и время просмотра различных элементов, а также интенсивность сигналов, излучаемых РЛС при просмотре каждого элемента, определяются используемым способом (программой) обзора рабочей зоны.
Обзор элементов рабочей зоны может производиться последовательно во времени или одновременно.
При последовательном обзоре не всегда может быть обеспечен необходимый темп получения информации о наличии и координатах целей в зоне обзора. Это связано с тем, что время облучения цели Т должно превышать максимальное время запаздывания сигнала ттах:
Т> "^шах 2^шах / с
где Ятах - максимальная дальность действия РЛС; с - скорость света.
Время однократного обзора всей зоны Т0 должно удовлетворять условию
Т0 - Т^а, р > (2^Шах / с)^а, р,
где Ыа р - число элементов разрешения по направлению.
При круговом обзоре с синтезированием апертуры должно выполняться определенное соотношение
Т - 2л / Оа.
Число импульсов, отраженных целью за это время, составит
П - Щ - ©Гё / Оа,
где - частота следования импульсов в пачке.
Период обзора рабочей зоны определяет темп поступления информации о наличии цели в зоне и не может превышать некоторого допустимого значения Т0 тах. Если эта величина задана, то
Оа - 2л / ^Ошах.
Это соотношение определяет минимальную угловую скорость вращения ДН антенны РЛС при круговом обзоре с синтезированием апертуры.
Выбором скорости вращения добиваются просмотра земной поверхности без пропусков.
Основные характеристики метода кругового обзора с синтезированием апертуры:
Время облучения цели;
Период обзора и число циклов обзора, приходящихся на каждую цель.
Сравнение метода кругового обзора с синтезированием апертуры с другими методами позволяет сделать следующие выводы.
1. Сканированием ДН приемной антенны обеспечивается просмотр всей подстилающей зем-
ной поверхности без пропусков. При этом угловая разрешающая способность получаемого изображения будет сопоставима с разрешающей способностью РСА в прожекторном режиме.
2. Время облучения практически не зависит от дальности цели.
3. Просмотр подстилающей земной поверхности за один период вращения происходит дважды и зависит от угловой скорости, определяющей количество циклов.
4. Энергетика РЛС значительно выше по сравнению с методом РСА, так как используется более узкая ДН. Цель (элемент местности) находится на направлении наблюдения, перпендикулярном вектору угловой скорости.
5. Выбором угла наклона антенны исключается обзор земной поверхности по горизонтальной
1. Соллогуб А. В. и др. Оценка эффективности кластера малых космических аппаратов дистанционного зондирования Земли по показателям оперативности и надежности выполнения функциональных задач // Информационно-управляющие системы. 2012. № 5(60). С. 24-28.
2. Верба В. С., Неронский Л. Б., Осипов И. Г., Турук В. Э. Радиолокационные системы землеобзора космического базирования / под ред. В. С. Вербы. - М.: Радиотехника, 2010. - 680 с.
3. Виноградов М. Возможности современных РЛС с синтезированием апертуры антенны // Зарубежное военное обозрение. 2009. № 2. С. 52-56.
дальности непосредственно под носителем, где разрешающая способность РЛС крайне низкая.
Заключение
В данной работе рассмотрены основные направления развития радиолокационных систем контроля земной поверхности космического базирования и история создания этих средств. Проанализированы существующие методы, выполнена сравнительная оценка основных технических характеристик. Предложен метод синтезирования апертуры на основе кругового перемещения приемной антенны с использованием КА со стабилизацией вращением. Определены пути улучшения технических характеристик бортового радиолокатора для решения прикладных задач.
4. Сесин А. Е., Шепета Д. А. Математическая модель эхо-сигналов морской поверхности, наблюдаемых бортовыми локаторами летательных аппаратов // Информационно-управляющие системы. 2010. № 2. С. 21-25.
5. Захарова Л. Н. и др. Совместный анализ данных оптических и радиолокационных сенсоров: возможности, ограничения и перспективы // Радиотехника и электроника. 2011. Т. 56. № 1. С. 5-19.
Одним из важных направлений использования РЛС является их применение на борту летательного аппарата, осуществляющих обзор земной поверхности. В зависимости от решаемых задач, требуемой величины зоны обзора и время обзора различают следующие виды обзора:
· полосовой обзор (переднебоковой обзор);
· секторный обзор;
· телескопический обзор.
Возможны и другие виды обзора, которые являются либо частными случаями вышеперечисленных обзоров, либо их комбинациями.
Мерой углового положения излучающего объекта и параметром, позволяющим измерить угловые координаты и обеспечить разрешение по углу, является частота Доплера. Благоприятные условия для решения этих задач создаются при условии бокового обзора земной поверхности летательного аппарата, выдерживающего курс, частоту и скорость.
Детальность радиолокационного изображения земной поверхности зависит от разрешающей способности в поперечном по отношению к РЛС направлению, а так же от разрешающей способности вдоль линии пути.
Разрешающая способность в поперечном направлении (тангенциальная разрешающая способность) зависит от полосы зондирующих сигналов и угла места объектов в поперечной плоскости.
Разрешающая способность вдоль линии пути различна при некогерентной и когерентной обработке. В первом случае она определяется шириной диаграммы направленности, соответствующей раскрыву размещенной на летательном аппарате антенны. При когерентной обработке, она может быть существенно увеличена соответственно синтезированному раскрыву, определяемому величиной перемещения летательного аппарата за время обработки.
При построении радиолокаторов с синтезированной аппаратурой на борту летательного аппарата устанавливаются слабонаправленная антенна, осуществляющая боковой обзор пространства (рис.6.1). Сигналы, принятые от различных точек траектории запоминаются и обрабатываются, как в антенной решетке, где они складываются синфазно, образуя максимум амплитуды суммарного сигнала.

Синтезированная антенна образуется перемещением одного элемента, ось диаграммы направленности которого ориентирована перпендикулярно прямолинейной траектории полета (рис.6.2).
При использовании импульсных сигналов они принимаются и запоминаются в точках траектории, отстоящих друг относительно друга на расстоянии где - скорость полета; - период повторения импульсов. Далее сигналы суммируются в схеме, изображенной на рис.2. Расстояние , на котором происходит суммирование, представляет собой апертуру синтезированной антенны (рис.6.3).

Суммирование сигналов осуществляется в линии задержки ЛЗ. Различают нефокусированные (рис.6.4.) и фокусированные синтезируемые антенны. Особенностью нефокусированной антенны является суммирование принимаемых сигналов несинфазно. Эквивалентная длинна ограничивается возможностью суммирования сигналов приблизительно в фазе, то есть когда разность расстояний от РЛС до цели не превосходит λ/8 (рис 6.5).
Ввиду малости второго слагаемого, получим
Ширина диаграммы направленности такой антенны
![]() (6.3)
(6.3)
В этом случае тангенциальная разрешающая способность
![]() (6.4)
(6.4)
улучшилась по сравнению с панорамной антенной
где - разрешающая способность по азимуту.
Теперь пропорциональна не R, а .

В фокусированных антеннах в антеннах в цепь элементов решетки вводятся фазовые сдвиги для компенсации перемещения РЛС относительно цели (рис.6.6).

Размер реальной антенны в горизонтальной плоскости равен L, ширина ее диаграммы
Длинна синтезированной антенны равна протяженности траектории полета, на которой РЛС облучает цепь (рис.6.7).
Ширина диаграммы направленности антенны равна
![]() .
.
Тангенциальная разрешающая способность
![]() . (6.7)
. (6.7)
Не зависит от дальности и равна половине размера реальной антенны.
Традиционным путем РЛС с синтезированной антенной построить невозможно так как требуется значительные: длина фокусированной антенны (сотни м); задержка сигналов в линии задержки (десятки с); число суммируемых импульсов (десятки тысяч).
На практике для построения РЛС с синтезированной антенной используется эффект Доплера и согласованная фильтрация. Информация о частоте Доплера используется как мера углового положения. Пусть вдоль прямой х, параллельной линии пути летательного аппарата, лежащей в полосе бокового обзора, расположены излучатели А непрерывных монохромических колебаний частоты f 0 (рис 6.8).

В каждый момент времени излучаемые колебания можно различать по частоте Доплера
![]() . (6.8)
. (6.8)
Если оценивать изменения во времени расстояния от приемника до точки А, можно определить закон модуляции сигналов
где - момент времени, когда приемник находиться на кратчайшем расстоянии r 0 от точки А. Квадратному изменению времени запаздывания соответствует линейное изменение мгновенной частоты
![]() (6.10)
(6.10)
Таким образом принимаемый сигнал оказывается частотно-модулированным. При обработке в оптимальном фильтре, согласованном с ожидаемым частотно-модулированным сигналом наблюдается сжатие сигнала. Длительность сжатого сигнала равна
![]() (6.11)
(6.11)
где - длительность импульсной характеристики фильтра. Аналогичный сжаты импульс будет получен, и для сигнала, приходящий от любой другой точки А; временной интервал между этими импульсами будет = где - скорость движения цели. Минимально разрешаемый временной интервал определяется длительностью сжатого импульса
Отношение / = можно рассматривать как меру синтезированного углового разрешения
![]() (6.13)
(6.13)
где = - размер эквивалентного синтезированного раскрыва, образованного при перемещении точки приема за длительность когерентного накопления . Сжатие позволяет получить разрешающую способность как у фокусированной антенны.
Для обеспечения разрешающей способности по дальности необходимо использовать импульсное излучение, причем импульсы должны быть когерентны между собой.
Таким образом, РЛС с синтезированной апертурой должна содержать
1. когерентно - импульсную РЛС с истинной когерентностью;
2. систему обработки сигналов, которая должна производить оптимальную обработку по азимуту (согласованную фильтрацию) в каждом элементе разрешению по дальности.
Один из вариантов такого локатора изображен на рис.6.9.
Могут применятся и другие схемы, однако сигналы должны быть когерентны (например вырезка из одного и того же гармонического колебания).
Выходным элементом приемника когерентно- импульсной РЛС является фазовый детектор, выходное напряжение которого определяется следующим образом
где , - амплитуды напряжений когерентного гетеродина и выходного сигнала;
Начальные фазы колебаний;
Доплеровское смещение частот.

Сигнал от точечной цели на выходе фазового детектора представляет собой импульсную последовательность с огибающей, повторяющей квадрат диаграммы направленности реальной антенны, и амплитудной модуляцией частотой Доплера (рис.6.10) Если в течении периода повторения Т п будет несколько целей, то согласованная фильтрация проводиться по каждой из них.

Существуют следующие способы построения соответствующей аппаратуры:
1. Запись сигналов с фазового детектора на фотопленку с последующей оптической обработкой.
2. Цифровая обработка сигналов.
В основу цифровой обработки положено оптимальное обнаружение пачки радиоимпульсов со случайной начальной фазой. Оптимальная обработка сводится к вычислению модуля корреляционного интеграла. Но так как сигнал не непрерывный, а дискретный, то вычисляется не интеграл, а сумма
где - выработка входного сигнала;
– опорная функция;
n – номер отсчета сигнала изображения;
k – номер отсчета опорной функции;
N – число дискретных значений опорной функции.
В случае цифровой обработки структурной схемы приемника имеет вид, изображенный на рис. 6.11.

Для нахождения действительной и мнимой частей представления входного сигнала устройство обработки строится с квадратурными каналами (рис.6.12). На рис. 6.13 изображена структура цифровой обработки в одном элементе разрешения.

В схеме выполняются операции, предусмотренные согласно формуле для S вых (n): находятся действительные и мнимые части произведения под знаком суммы для каждого из N значений опорной функции и суммируются.





 Обновилось приложение на iOS?
Обновилось приложение на iOS? Лучшие твики и репозитории для Cydia Cydia репозитории ios 7
Лучшие твики и репозитории для Cydia Cydia репозитории ios 7 Разблокировка ZTE A5 Pro Моментальное получение кода после оплаты
Разблокировка ZTE A5 Pro Моментальное получение кода после оплаты Как создать новый Apple ID: регистрация в App Store без карты Создать новую учетную запись на айфон 4
Как создать новый Apple ID: регистрация в App Store без карты Создать новую учетную запись на айфон 4